
As I took two months of holidays between jobs during summer, I finally had time for a little handcrafts project: A minimal leather wallet for the few cards I usually carry with me. Norway is basically cash-free, so there is no need for coin or bill compartments.

I first needed to find a place where I could get smaller pieces of suitable leather. As it turned out, the only shop with a decent selection was a cute little furniture restoration place near the city centre. Aside the beautiful but amazingly expensive full cow-sides, there also was a little box of various leather left-overs:

I drafted the design on paper and cut the pieces to shape with a bit of extra space around the seam so I could later cut off a millimetre to get a clean finish. To secure the parts into place, I glued the two inner pockets to the central piece along the edges, adding two thick books for even pressure. To keep the inner card from slipping too far in, I machine-sewed a later hidden stitch of 2cm length across the pockets. After this I glued the outer pockets in place and let everything dry for a night.
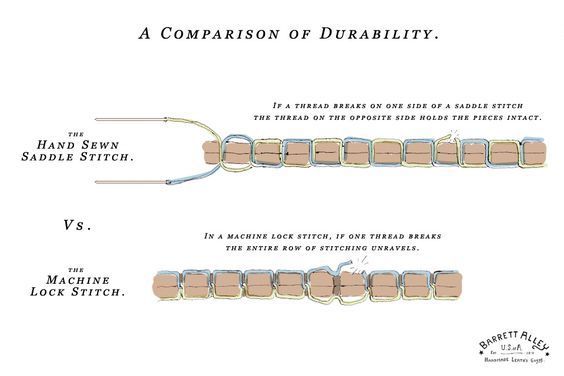
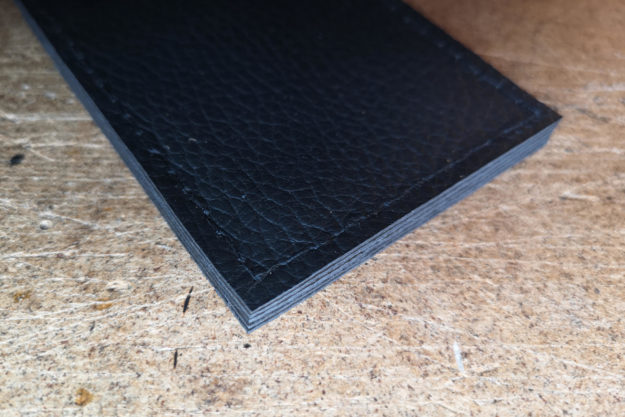
With a stitching awl I prepared the holes about 4mm from the edges with 5mm spacing (this was the easier choice, but next time I might go down to 3-4mm spacing). Using a hand-sewn saddle stitch pattern with an extra durable upholstery thread, I joined the pieces together.
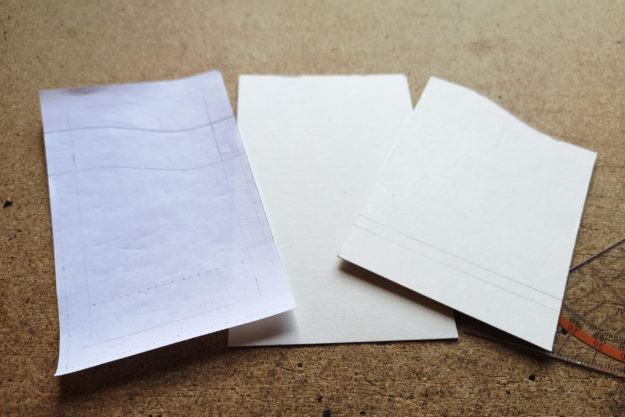

For the final cleaning cut, I supported all sides with little leftover pieces in order to get even thickness and a proper grip for clamping it down with a ruler. Once the leather was properly secured in place and aligned, I cut off about 1mm along all edges with a rotary cutter.


Let’s how this one holds up to daily use. I already have some other designs in mind, I will just need to find the time for it. 😀










































































